„Hohe Positioniergenauigkeit“ bedeutet
In Japan wird der Rückgang der Erwerbsbevölkerung mehr Arbeitskräfteeinsparungen an den Produktionslinien erfordern als je zuvor, und in diesem Zusammenhang wird erwartet, dass sich Industrieroboter noch weiter verbreiten werden. Industrieroboter müssen eine Reihe sich wiederholender Bewegungen ausführen, und ihre Antriebsteile müssen ein hohes Maß an Positionierungsgenauigkeit aufweisen.
Eine „hohe Positioniergenauigkeit“ im Übertragungsmechanismus bedeutet, dass bei einer Drehung oder Hin- und Herdrehung der Antriebsscheibe auf der Antriebsseite die Abtriebsscheibe auf der Abtriebsseite ebenfalls die gleiche Anzahl Umdrehungen (gleiche Position) ausführt.
Die folgende Grafik zeigt die Ergebnisse eines Tests, bei dem mit einem Encoder die Drehzahl der Antriebsscheibe (blaue Linie) und der angetriebenen Scheibe (rote Linie) gemessen wurde, während die Geschwindigkeit ab dem Beginn des Riemenantriebs in einem Synchronriemenantrieb auf 40 m/s erhöht wurde. Der Unterschied zwischen den Drehzahlen der Antriebsscheibe und der angetriebenen Scheibe wird als Phasendifferenz bezeichnet. Wie aus der Grafik ersichtlich, beginnt sich die angetriebene Scheibe über den Riemen zu bewegen, wenn die Antriebsscheibe anfängt, sich zu drehen. Aufgrund der Elastizität des Riemens tritt jedoch eine leichte Verzögerung auf. Der Riemen ist elastisch, daher tritt eine leichte Verzögerung auf. Danach wird die Antriebsscheibenseite vom Riemen gezogen, und es kann zu einem Überschwingen kommen, das die Drehzahl der Antriebsscheibe überschreitet. Der Unterschied (Bereich) zwischen der Antriebsscheibe (blaue Linie) und der angetriebenen Scheibe (rote Linie) ist einer der Indikatoren für die Reaktion. Je kleiner dieser Bereich ist, desto schneller kann der Motor auf die Motorleistung reagieren und Kraft auf die angetriebene Seite übertragen, wodurch die Positionierungsgenauigkeit der Maschine verbessert wird. Je kleiner diese Fläche ist, desto schneller kann der Motor auf die Leistung reagieren und Kraft auf die angetriebene Seite übertragen.
| Umdrehungsgeschwindigkeit (U/min) |  |
Testbedingungen
Antriebsseite: 24 Zähne |
| Zeit (m/s) |

Bei Mechanismen wie Industrierobotern, die eine schnelle Beschleunigung, ein plötzliches Anhalten und eine hin- und hergehende Rotation erfordern, treten in kurzer Zeit häufig Änderungen der Rotationsgeschwindigkeitszyklen auf, und dieser Phasenunterschied wirkt sich stark auf die Positioniergenauigkeit der Maschine aus. In diesem Artikel definieren wir „weniger Phasenunterschied = bessere Reaktion und Positioniergenauigkeit“ und erläutern die empfohlenen Übertragungsmechanismen und Produktauswahlpunkte, um ein hohes Maß an Positioniergenauigkeit zu erreichen.
Empfohlener Übertragungsmechanismus für erhöhte Positionierungsgenauigkeit
Welche Art von Übertragungsmechanismus sollte dann ausgewählt werden, um eine hohe Positioniergenauigkeit zu erreichen? Wir haben eine Liste mit Merkmalen für jeden der in Maschinenantrieben üblicherweise verwendeten Übertragungsmechanismen zusammengestellt: „Zahnriemen“, „Kette“, „Kugelumlaufspindel“ und „Linearantrieb“.
Die obige Tabelle zeigt, dass der „Zahnriemen“ der Übertragungsmechanismus mit den besten Eigenschaften ist. Viele Leute haben vielleicht den Eindruck, dass „Linearantrieb“ und „Kugelumlaufspindel“ hinsichtlich der Positioniergenauigkeit überlegen sind. Preis, Designflexibilität und Wartungsfreundlichkeit können jedoch häufig Hindernisse für ihre Einführung darstellen. Zahnriemen- und Kettenantriebe bieten dagegen Kostenvorteile und ein hohes Maß an Designfreiheit, sodass ihre Einführung leicht in Betracht gezogen werden kann. Ketten haben die Nachteile, dass sie aus Metall bestehen, schwer und laut sind und geschmiert werden müssen. Im Vergleich dazu ist der Zahnriemen der beste Übertragungsmechanismus für Maschinen, die ein hohes Maß an Positioniergenauigkeit erfordern.
Selbst nach dieser Erklärung haben manche Leute möglicherweise immer noch einen negativen Eindruck von Synchronriemen und sagen, dass die Positioniergenauigkeit unter hoher Belastung schlechter ist als die eines metallischen Übertragungsmechanismus, wenn die Elastizität des Riemens so beschaffen ist, dass es sich um einen Synchronriemen handelt. Die jüngste Entwicklung des Synchronriemens macht es jedoch unklug, ihn nicht als Option in die Maschinenkonstruktion einzubeziehen. Mit der Weiterentwicklung der Technologie werden Synchronriemen für hohe Belastungen entwickelt.
Welche Faktoren beeinflussen die Positioniergenauigkeit von Zahnriemen?
Kabel
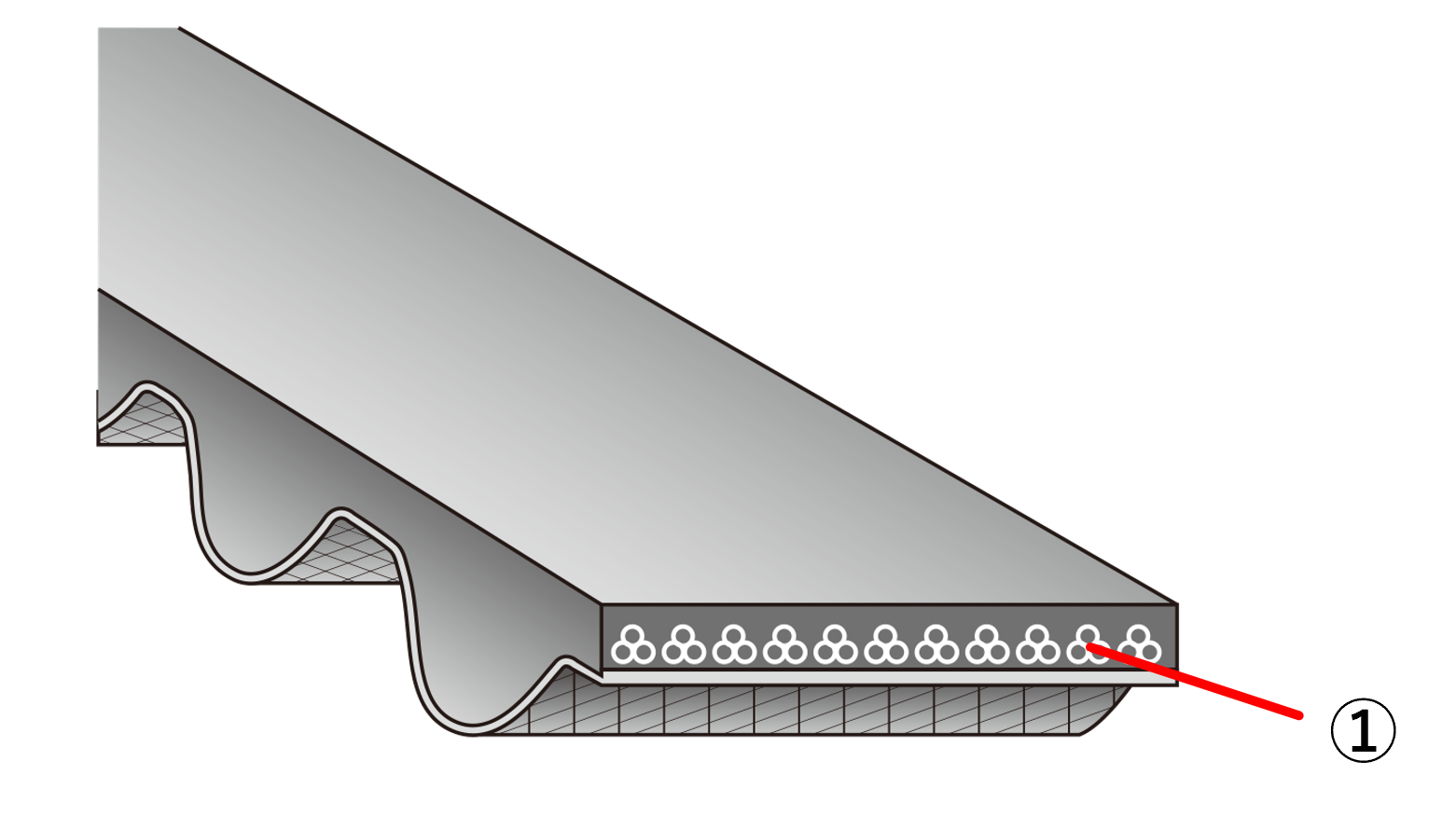
Der wichtigste Faktor, der die Phasendifferenz beeinflusst, ist der Elastizitätsmodul des Seils. Der Riemen verfügt über ein Element namens „Seil“, das die Kraft überträgt. Ein Seil mit geringer Dehnung (hoher Elastizitätsmodul) verbessert die Reaktion und verringert die Phasendifferenz.
① Synchronriemenschnur
Die folgende Grafik vergleicht die Phasendifferenz zwischen einem Glasfaserkabel (orange Linie), das häufig als allgemeines Synchronriemenkabel verwendet wird, und einem Kohlenstoffkabel (graue Linie), das über einen hohen Elastizitätsmodul verfügt. Es ist ersichtlich, dass die Auslaufbreite des Kohlenstoffkabels kleiner ist als die des Glasfaserkabels, wenn es anfängt, anzutreiben. Mit anderen Worten kann das Kohlenstoffkabel schneller auf die Motorleistung reagieren und Leistung auf die angetriebene Seite übertragen, was zu einer geringeren Ansammlung von endgültigen Fehlausrichtungen führt.
| Phasendifferenz (U/min) |
 |
Glasschnur Kohlenstoffschnur |
| Zeit (m/s) |
Gegenreaktion
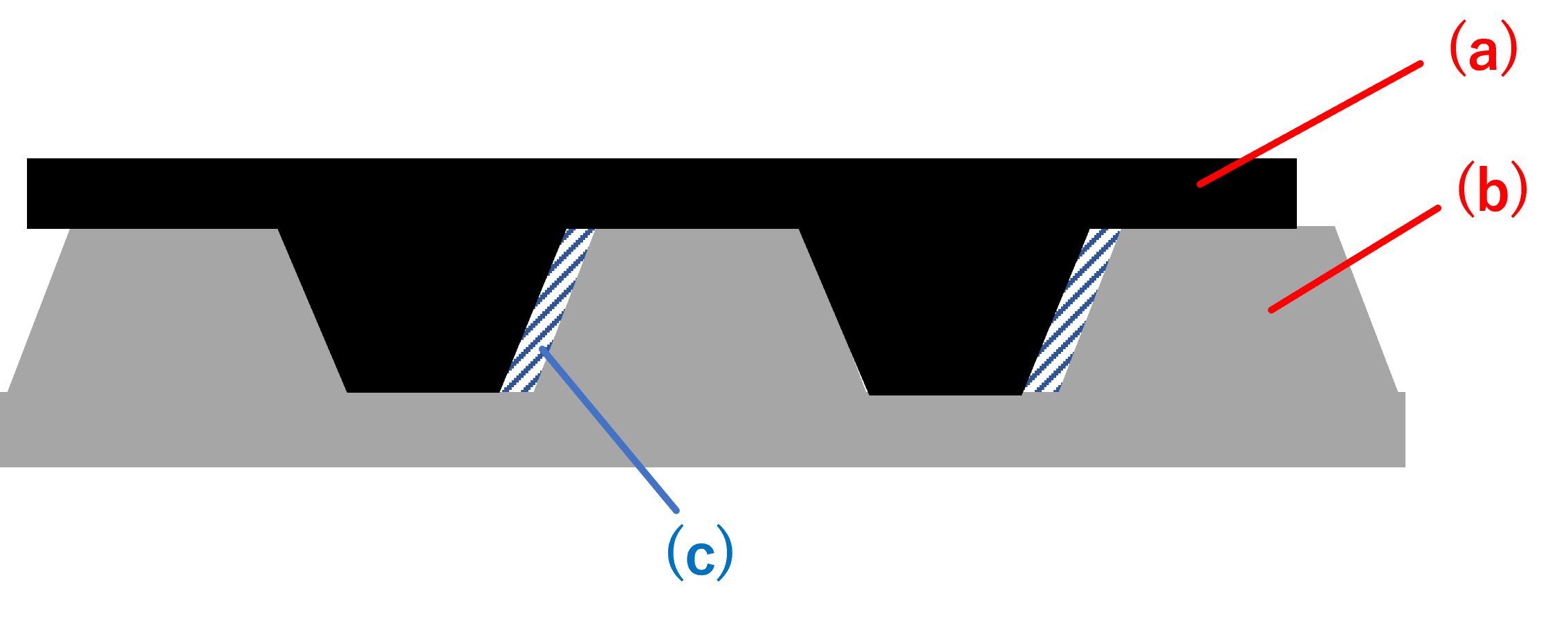
Das Spiel ist ein weiterer Faktor, der die Positioniergenauigkeit beeinflusst. Es bezeichnet den Abstand zwischen Riemenscheiben- und Riemenzahn. Die Größe dieses Abstands wird als „Spielbetrag“ bezeichnet. Bei großem Spiel kommt es zu einem zeitlichen Unterschied in der Drehung der Antriebs- und Abtriebsscheibe, wenn der Riemen gestartet wird oder wenn er sich rückwärts dreht. Um die Positioniergenauigkeit zu verbessern, sollte das Spiel daher so gering wie möglich sein.
*(a) Riemen (b) Riemenscheibe (c) Spiel
Der wichtigste Faktor, der das Spiel bestimmt, ist die Zahnform des Riemens. Zahnformen von Synchronriemen werden hauptsächlich in „Trapezzahn“, „Bogenzahn“ und „Dreieckszahn“ eingeteilt.
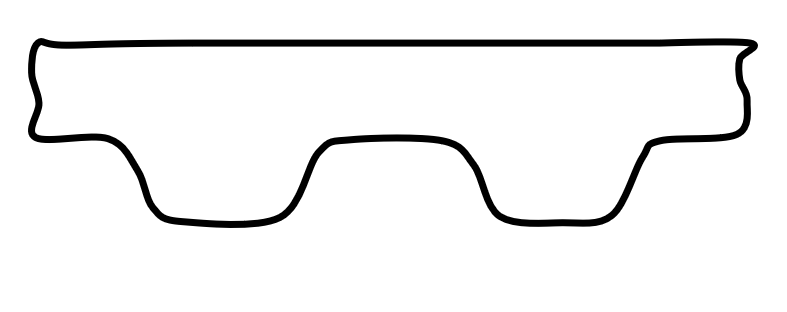
Der „Trapezzahn“ ist eine in der Anfangszeit der Synchronriemen entwickelte Zahnform, die beim Einkuppeln ein großes Spiel mit der Riemenscheibe aufweist, was zu einer relativ geringen Positioniergenauigkeit beim Vorwärts- und Rückwärtslauf führt.
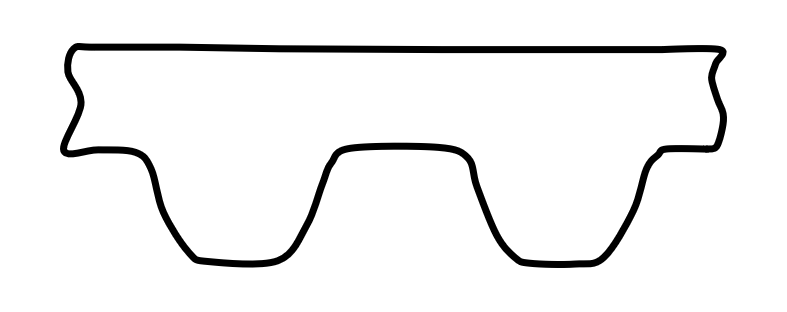
Der „Bogenzahn“ ist eine Zahnform, die für höhere Positioniergenauigkeit, höhere Tragfähigkeit und längere Lebensdauer ausgelegt ist. Die Bogenform sorgt für ein sanfteres Eingreifen und reduziert das Spiel. Diese beiden Effekte verbessern die Positioniergenauigkeit.
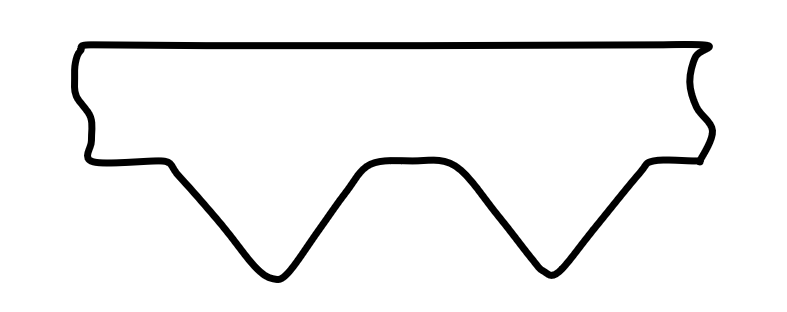
Beim Typ „Dreieckszahn“ greift der Riemen immer in die Riemenscheibe ein, indem er beide Spannungsflächen berührt, was zu keinem Spiel führt. Dieser Typ wird jedoch häufig für Anwendungen verwendet, die eine hohe Positioniergenauigkeit, geringe Lasten und relativ geringe Lastschwankungen erfordern, da bei hohen Lasten mit hoher Wahrscheinlichkeit fehlende Zähne, Überspringen und andere Fehler auftreten können.
Welcher Riemen eignet sich am besten für eine hochpräzise Positionierung?
Aus den vorangegangenen Erläuterungen haben Sie vielleicht verstanden, dass sich ein Riemen mit einem hochelastischen Kord und einer kreisbogenförmigen Zahnform optimal zur Reduzierung von Phasenunterschieden bei hoher Belastung und Lastschwankungen eignet.
Und der Synchronriemen, der diese Bedingungen erfüllt, ist der erstklassige Hochlast-Synchronriemen Ceptor®-X von Bando Chemical.
Ceptor®-X verwendet ein hochelastisches Carbonkabel, das für eine bessere Reaktion und geringere Phasendifferenz sorgt. Darüber hinaus wird der „Stooth-Typ“ verwendet, der eine große Übertragungskapazität zwischen den Bogenzähnen aufweist.
Ceptor®-X ist der Riemen der Wahl für alle, die ein hohes Maß an dauerhafter Positioniergenauigkeit unter schweren Lasten benötigen.
Darüber hinaus hat die verbesserte Übertragungskapazität pro Breite den Vorteil, dass der Riemen 40 % schmaler ist als bei unserem HP-STS, einem Standard-Geradezahntyp unter denselben Bedingungen. Dies reduziert das Gewicht und den Platzbedarf des Riemens und der Riemenscheibe, die ihn aufnimmt, was sowohl zu einer hohen Positioniergenauigkeit als auch zu leichten, platzsparenden Maschinen führt.
Ceptor®-X wird hauptsächlich in verschiedenen Anwendungen wie Industrierobotern, medizinischen und pharmazeutischen Geräten, Halbleiterfertigungsanlagen und Spritzgussmaschinen eingesetzt. Detaillierte Anwendungsbeispiele finden Sie unten auf dieser Seite.
Zusammenfassung
Wir haben die Definition der Positioniergenauigkeit in Übertragungsmechanismen und den empfohlenen Synchronriemen Ceptor®-X zum Erreichen einer hohen Positioniergenauigkeit erläutert. Wenn Sie an einer hohen Positioniergenauigkeit in Mechanismen interessiert sind, die hohen Belastungen ausgesetzt sind, ziehen Sie bitte den Ceptor®-X von Bando Chemical in Betracht. Wenn Sie Fragen haben, können Sie sich gerne an uns wenden.