"Alta precisión de posicionamiento" significa
En Japón, la disminución de la población activa requerirá más ahorro de mano de obra en las líneas de producción que nunca antes, y se espera que los robots industriales se generalicen aún más en este contexto. Los robots industriales deben realizar una serie de movimientos repetitivos y sus piezas de accionamiento deben tener un alto grado de precisión de posicionamiento.
"Alta precisión de posicionamiento" en el mecanismo de transmisión significa que cuando la polea motriz en el lado de transmisión realiza una rotación o rotación alternativa, la polea conducida en el lado conducido también realiza la misma cantidad de revoluciones (misma posición).
El gráfico siguiente muestra los resultados de una prueba en la que se utiliza un codificador para medir la velocidad de rotación de la polea motriz (línea azul) y la polea impulsada (línea roja) en el proceso de aumentar la velocidad a 40 m/s desde el inicio de la transmisión por correa en una transmisión por correa síncrona. La diferencia entre las velocidades de rotación de la polea motriz y la polea impulsada se denomina diferencia de fase. Como se puede ver en el gráfico, cuando la polea motriz comienza a girar, la polea impulsada comienza a moverse a través de la correa, pero hay un ligero retraso debido a la elasticidad de la correa. La correa es elástica, por lo que hay un ligero retraso. Después de eso, el lado de la polea motriz es tirado por la correa y puede producirse un sobreimpulso que exceda las rpm de la polea motriz. La diferencia (área) entre la polea motriz (línea azul) y la polea impulsada (línea roja) es uno de los indicadores de respuesta, y cuanto menor sea esta área, más rápido puede responder el motor a la salida del motor y transmitir fuerza al lado impulsado, mejorando así la precisión de posicionamiento de la máquina. Cuanto más pequeña sea esta área, más rápido podrá el motor responder a la salida y transmitir fuerza al lado impulsado.
| Velocidad de revolución (rotación) (rpm) |  |
condiciones de prueba
Lado de accionamiento: 24 dientes |
| Tiempo (m/s) |

En mecanismos como los robots industriales que requieren aceleración rápida, parada repentina y rotación recíproca, los cambios en los ciclos de velocidad de rotación ocurren con frecuencia en un corto período de tiempo, y esta diferencia de fase afecta en gran medida la precisión de posicionamiento de la máquina. En este artículo, definimos "menor diferencia de fase = mejor respuesta y precisión de posicionamiento", y explicamos los mecanismos de transmisión recomendados y los puntos de selección de productos para lograr un alto nivel de precisión de posicionamiento.
Mecanismo de transmisión recomendado para una precisión de posicionamiento avanzada
Entonces, ¿qué tipo de mecanismo de transmisión se debe seleccionar para lograr una alta precisión de posicionamiento? Hemos compilado una lista de características para cada uno de los mecanismos de transmisión que se utilizan comúnmente en los accionamientos de máquinas: "correa síncrona", "cadena", "husillo de bolas" y "accionamiento lineal".
La tabla anterior muestra que la "correa síncrona" es el mecanismo de transmisión con las características más excelentes. Muchas personas pueden tener la impresión de que el "accionamiento lineal" y el "husillo de bolas" son superiores desde el punto de vista de la precisión de posicionamiento. Sin embargo, el precio, la flexibilidad de diseño y la facilidad de mantenimiento pueden ser a menudo barreras para considerar su introducción. Las transmisiones por correa síncrona y por cadena, por otro lado, ofrecen ventajas de costo y un alto grado de libertad de diseño, lo que hace que sea fácil considerar su introducción. Las cadenas tienen las desventajas de estar hechas de metal, ser pesadas, ruidosas y requerir lubricación. En comparación, la correa síncrona es el mejor mecanismo de transmisión para máquinas que requieren un alto grado de precisión de posicionamiento.
Incluso después de esta explicación, algunas personas pueden seguir teniendo una impresión negativa de las correas síncronas, diciendo que la precisión de posicionamiento bajo cargas elevadas es inferior a la de un mecanismo de transmisión de metal, si la elasticidad de la correa es tal que es una correa síncrona. Sin embargo, la reciente evolución de la correa síncrona hace que no sea prudente no incluirla como una opción en el diseño de máquinas. A medida que evoluciona la tecnología, se están desarrollando correas síncronas de alta carga.
¿Cuáles son los factores que afectan la precisión de posicionamiento de las correas síncronas?
cable
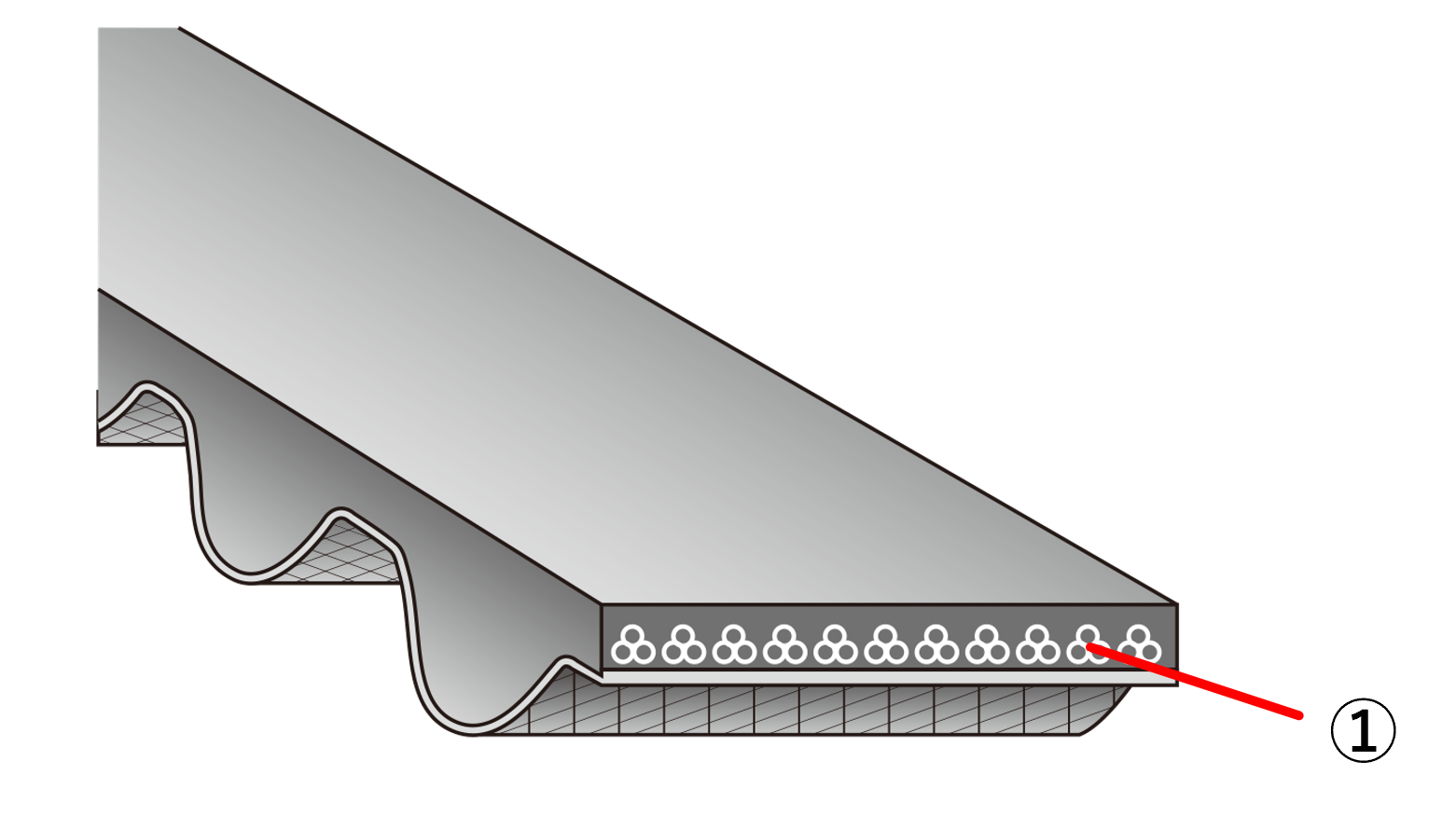
El factor más significativo que afecta la diferencia de fase es el módulo de elasticidad del cable. La correa tiene un elemento llamado "cable" que transmite potencia, y un cable con baja elongación (alto módulo de elasticidad) mejora la respuesta y reduce la diferencia de fase.
1. Cable de correa síncrona
El siguiente gráfico compara la diferencia de fase entre un cordón de vidrio (línea naranja), que se utiliza a menudo como cordón de correa síncrona general, y un cordón de carbono (línea gris), que tiene la característica de un alto módulo de elasticidad. Se puede ver que el ancho de salida del cordón de carbono es menor que el del cordón de vidrio cuando comienza a accionarse. En otras palabras, el cordón de carbono puede responder a la salida del motor más rápidamente y transmitir potencia al lado accionado, lo que conduce a una menor acumulación de desalineación final.
| diferencia de fase (rpm) |
 |
cordón de vidrio cordón de carbono |
| Tiempo (m/s) |
Reacción
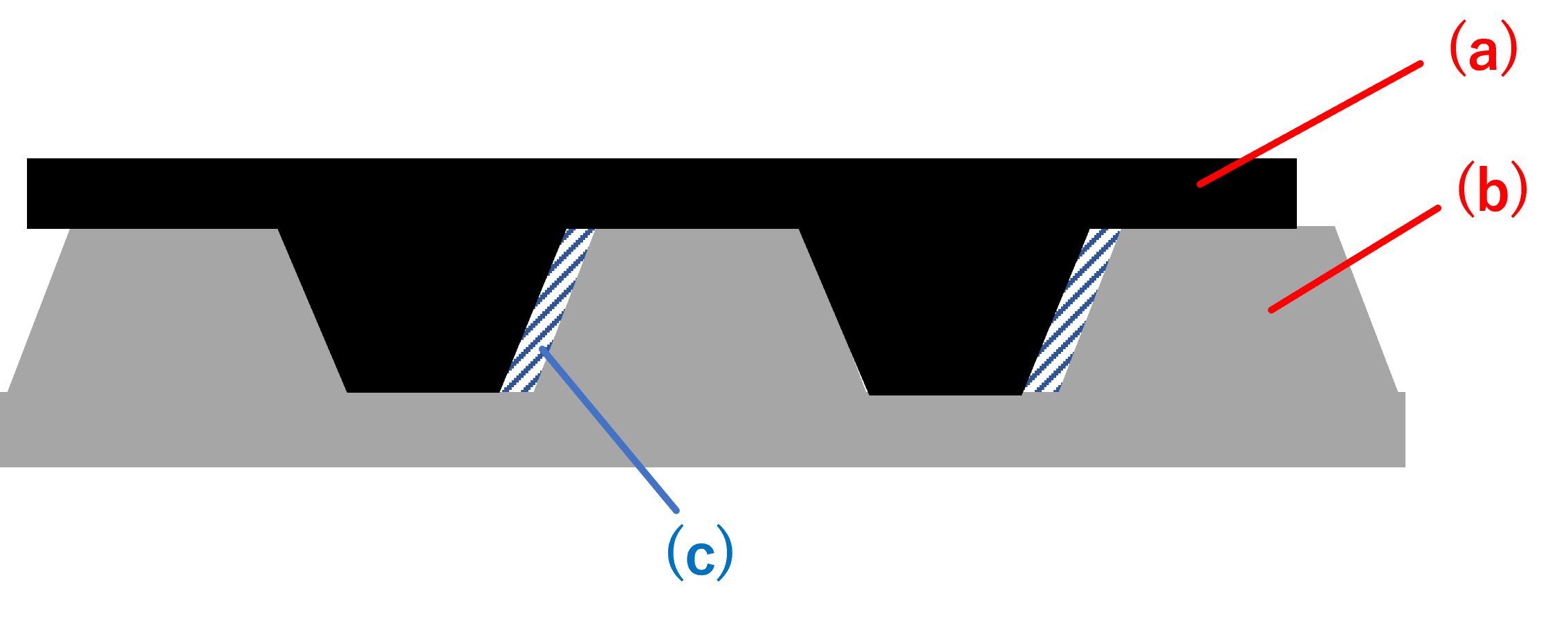
El juego es otro factor que afecta la precisión del posicionamiento. Se refiere a la distancia entre el diente de la polea y el diente de la correa, y la magnitud de este espacio se denomina "juego". Si el juego es grande, habrá una diferencia de tiempo entre la rotación de la polea motriz y la polea conducida al arrancar la correa o al girar en reversa. Por lo tanto, para mejorar la precisión del posicionamiento, el juego debe ser lo más pequeño posible.
*(a) Correa (b) Polea (c) Juego
El factor más importante que determina la cantidad de juego es la forma de los dientes de la correa. Las formas de los dientes de la correa síncrona se clasifican principalmente en "diente trapezoidal", "diente de arco" y "diente triangular".
"Diente trapezoidal" es una forma de diente desarrollada en los primeros días de las correas síncronas, que tiene una gran cantidad de juego con la polea durante el acoplamiento, lo que resulta en una precisión de posicionamiento relativamente baja durante la operación de avance y retroceso.
El "diente en arco" es una forma de diente diseñada para lograr una mayor precisión de posicionamiento, una mayor capacidad de carga y una vida útil más prolongada. La forma de arco hace que el acoplamiento sea más suave y reduce el juego. Estos dos efectos mejoran la precisión de posicionamiento.
En el tipo de "diente triangular", la correa siempre se acopla a la polea al entrar en contacto con ambas superficies de tensión, lo que da como resultado un juego nulo. Sin embargo, este tipo se utiliza a menudo para aplicaciones que requieren una alta precisión de posicionamiento, cargas ligeras y fluctuaciones de carga relativamente pequeñas, ya que es muy probable que provoque la falta de dientes, saltos y otras fallas bajo cargas pesadas.
¿Cuál es el mejor cinturón para un posicionamiento de alta precisión?
Es posible que haya comprendido a partir de las explicaciones anteriores que una correa con un cordón de alta elasticidad y una forma de diente de arco circular es óptima para reducir las diferencias de fase en condiciones de alta carga y fluctuación de carga.
Y la correa síncrona que satisface estas condiciones es la correa síncrona de alta carga y de gama alta Ceptor®-X de Bando Chemical.
Ceptor®-X utiliza un cordón de carbono de alta elasticidad, que proporciona una mejor respuesta y una menor diferencia de fase. Además, se utiliza el tipo “Stooth”, que tiene una gran capacidad de transmisión entre los dientes del arco.
Ceptor®-X es el cinturón elegido por quienes requieren un alto grado de precisión de posicionamiento a largo plazo bajo cargas pesadas.
Además, la capacidad de transmisión mejorada por ancho tiene la ventaja de hacer que el ancho de la correa sea un 40% más estrecho que el de nuestra HP-STS, que es un tipo de dientes estándar en las mismas condiciones. Esto reduce el peso y el espacio de la correa y la polea que la recibe, lo que se traduce en una alta precisión de posicionamiento y en máquinas ligeras que ahorran espacio.
Ceptor®-X se utiliza principalmente en diversas aplicaciones, como robots industriales, equipos médicos y farmacéuticos, equipos de fabricación de semiconductores y máquinas de moldeo por inyección. Consulte la parte inferior de esta página para obtener ejemplos y aplicaciones detalladas.
resumen
Hemos explicado la definición de precisión de posicionamiento en mecanismos de transmisión y la correa síncrona Ceptor®-X recomendada para lograr un alto nivel de precisión de posicionamiento. Si está interesado en lograr una alta precisión de posicionamiento en mecanismos sometidos a cargas elevadas, considere Ceptor®-X de Bando Chemical. Si tiene alguna pregunta, no dude en contactarnos.