ความแม่นยำในการวางตำแหน่งสูง" หมายถึง
ในญี่ปุ่น การลดลงของประชากรที่ทำงานจะทำให้ต้องมีการประหยัดแรงงานในการผลิตมากขึ้นกว่าที่เคย และหุ่นยนต์อุตสาหกรรมคาดว่าจะมีการใช้มากขึ้นในบริบทนี้ หุ่นยนต์อุตสาหกรรมจำเป็นต้องทำการเคลื่อนไหวที่ซ้ำ ๆ และส่วนขับเคลื่อนของหุ่นยนต์ต้องมีความแม่นยำสูงในการกำหนดตำแหน่ง
"ความแม่นยำสูงในการกำหนดตำแหน่ง" ในกลไกการส่งกำลังหมายถึง เมื่อ pully ขับเคลื่อนบนด้านขับทำการหมุนหนึ่งรอบหรือหมุนกลับไปกลับมา pully ที่ขับเคลื่อนบนด้านที่ถูกขับก็จะหมุนตามจำนวนรอบเดียวกัน (ตำแหน่งเดียวกัน)
กราฟด้านล่างแสดงผลการทดสอบโดยใช้เครื่องเข้ารหัส (encoder) วัดความเร็วการหมุนของปีกผ้าพันคอที่ขับเคลื่อน (เส้นสีน้ำเงิน) และปีกผ้าพันคอที่ถูกขับ (เส้นสีแดง) ในกระบวนการเพิ่มความเร็วถึง 40 ม./วินาทีจากจุดเริ่มต้นของการขับเคลื่อนสายพานในระบบการขับเคลื่อนสายพานซิงโครนัส ความแตกต่างระหว่างความเร็วรอบของปีกผ้าพันคอที่ขับเคลื่อนและปีกผ้าพันคอที่ถูกขับเรียกว่า ความแตกต่างของเฟส (phase difference) จากกราฟสามารถเห็นได้ว่า เมื่อปีกผ้าพันคอที่ขับเคลื่อนเริ่มหมุน ปีกผ้าพันคอที่ถูกขับก็เริ่มเคลื่อนที่ผ่านสายพาน แต่จะมีการหน่วงเล็กน้อยเนื่องจากความยืดหยุ่นของสายพาน เพราะสายพานมีความยืดหยุ่น จึงเกิดการหน่วงเล็กน้อย หลังจากนั้น ปีกผ้าพันคอที่ขับเคลื่อนจะถูกดึงโดยสายพาน และอาจเกิดการพุ่งเกินความเร็วรอบของปีกผ้าพันคอที่ขับได้ ความแตกต่าง (พื้นที่) ระหว่างปีกผ้าพันคอที่ขับเคลื่อน (เส้นสีน้ำเงิน) และปีกผ้าพันคอที่ถูกขับ (เส้นสีแดง) เป็นหนึ่งในตัวชี้วัดการตอบสนอง และยิ่งพื้นที่นี้เล็กลงเท่าไร มอเตอร์ก็จะตอบสนองต่อการส่งออกของมอเตอร์และถ่ายโอนพลังงานไปยังด้านที่ถูกขับเคลื่อนได้เร็วขึ้น ซึ่งจะช่วยปรับปรุงความแม่นยำในการกำหนดตำแหน่งของเครื่องจักร
| Revolution (rotational) speed (rpm) |  |
เงื่อนไขการทดสอบ
ด้านขับ: 24 ฟัน |
| Time (m/s) |

ในกลไกต่าง ๆ เช่น หุ่นยนต์อุตสาหกรรมที่ต้องการการเร่งความเร็วอย่างรวดเร็ว การหยุดกระทันหัน และการหมุนกลับไปกลับมา การเปลี่ยนแปลงในรอบความเร็วในการหมุนจะเกิดขึ้นบ่อยครั้งในระยะเวลาอันสั้น และความแตกต่างของเฟสนี้มีผลกระทบอย่างมากต่อความแม่นยำในการกำหนดตำแหน่งของเครื่องจักร ในบทความนี้ เรากำหนดว่า "ความแตกต่างของเฟสที่น้อยลง = การตอบสนองและความแม่นยำในการกำหนดตำแหน่งที่ดีกว่า" และอธิบายกลไกการส่งกำลังที่แนะนำและจุดที่ควรพิจารณาในการเลือกผลิตภัณฑ์เพื่อให้ได้ความแม่นยำในการกำหนดตำแหน่งที่สูง
กลไกการส่งกำลังที่แนะนำสำหรับความแม่นยำในการระบุตำแหน่งขั้นสูง
แล้วควรเลือกกลไกการส่งกำลังแบบใดเพื่อให้ได้ความแม่นยำในการวางตำแหน่งสูง เราได้รวบรวมรายการคุณลักษณะของกลไกการส่งกำลังแต่ละแบบที่ใช้ทั่วไปในการขับเคลื่อนเครื่องจักร ได้แก่ "สายพานซิงโครนัส" "โซ่" "บอลสกรู" และ "ไดรฟ์เชิงเส้น"
ตารางข้างต้นแสดงให้เห็นว่า "สายพานซิงโครนัส" เป็นกลไกการส่งกำลังที่มีคุณสมบัติที่ดีที่สุด หลายคนอาจมีความเข้าใจว่า "การขับเคลื่อนแบบเส้นตรง" และ "สกรูบอล" มีความเหนือกว่าในแง่ของความแม่นยำในการระบุตำแหน่ง แต่ในแง่ของราคา ความยืดหยุ่นในการออกแบบ และความสะดวกในการบำรุงรักษา อาจเป็นอุปสรรคในการพิจารณานำมาใช้ ในขณะที่สายพานซิงโครนัสและการขับเคลื่อนด้วยโซ่ให้ข้อได้เปรียบด้านราคาและความยืดหยุ่นในการออกแบบ ทำให้สามารถพิจารณานำมาใช้ได้ง่าย โซ่มีข้อเสียคือทำจากโลหะ มีน้ำหนักมาก เสียงดัง และต้องการการหล่อลื่น ในขณะที่สายพานซิงโครนัสเป็นกลไกการส่งกำลังที่ดีที่สุดสำหรับเครื่องจักรที่ต้องการความแม่นยำในการระบุตำแหน่งสูง
แม้หลังจากคำอธิบายนี้แล้ว บางคนอาจยังมีความเห็นในแง่ลบเกี่ยวกับสายพานซิงโครนัส โดยกล่าวว่าความแม่นยำในการระบุตำแหน่งภายใต้ภาระหนักนั้นด้อยกว่ากลไกการส่งกำลังแบบโลหะ หากความยืดหยุ่นของสายพานเป็นลักษณะของสายพานซิงโครนัส อย่างไรก็ตาม การพัฒนาล่าสุดของสายพานซิงโครนัสทำให้การไม่พิจารณามันเป็นตัวเลือกในการออกแบบเครื่องจักรนั้นไม่สมเหตุสมผล เมื่อเทคโนโลยีพัฒนาไป สายพานซิงโครนัสที่รองรับภาระหนักกำลังได้รับการพัฒนา
ปัจจัยใดบ้างที่ส่งผลต่อความแม่นยำในการวางตำแหน่งของสายพานแบบซิงโครนัส?
cord
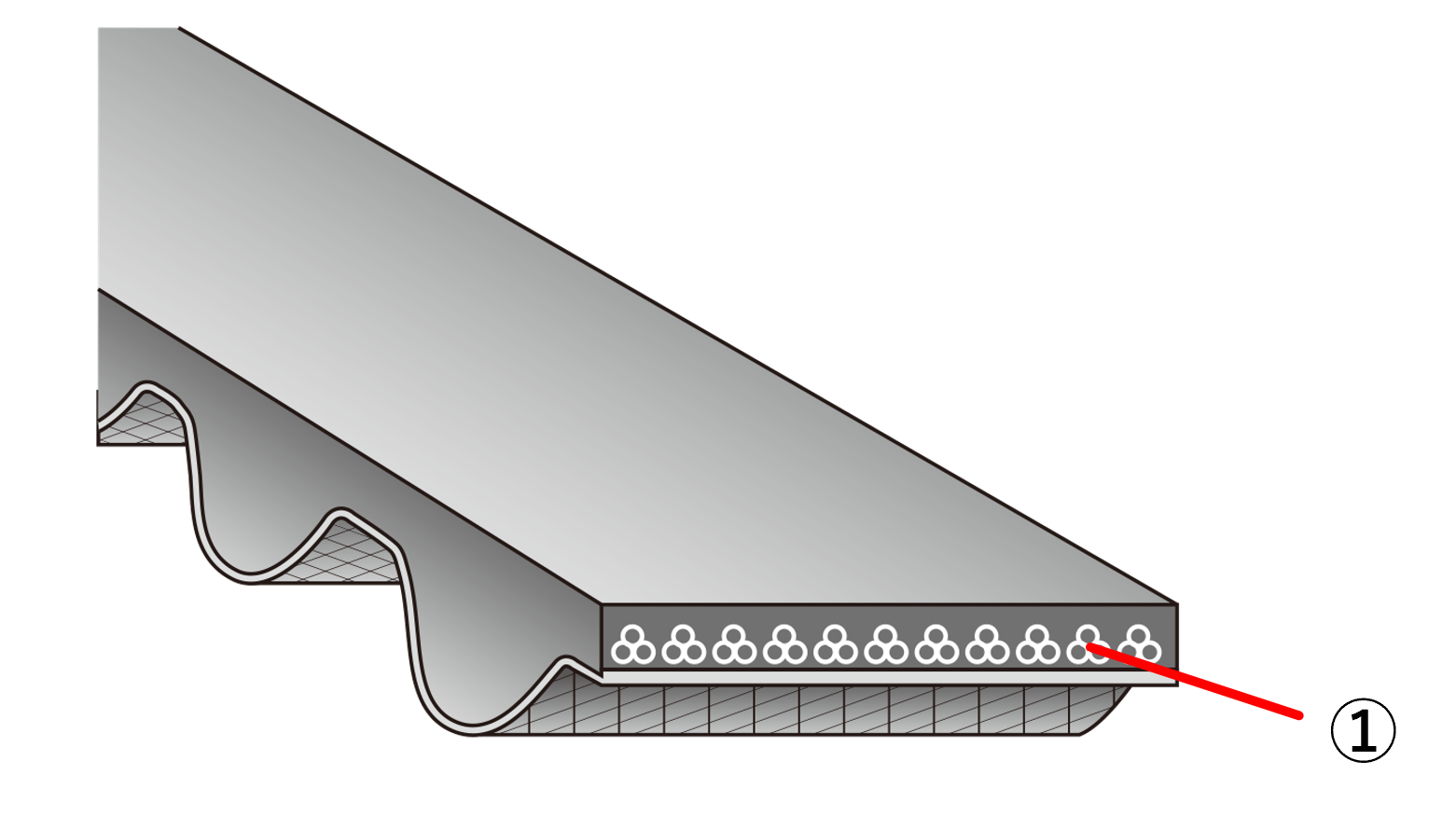
ปัจจัยที่สำคัญที่สุดที่ส่งผลต่อความแตกต่างของเฟสคือโมดูลัสความยืดหยุ่นของสาย สายพานมีส่วนประกอบที่เรียกว่า "cord" ซึ่งทำหน้าที่ส่งกำลัง และสายที่มีการยืดตัวต่ำ (โมดูลัสความยืดหยุ่นสูง) จะช่วยปรับปรุงการตอบสนองและลดความแตกต่างของเฟส
①Cordสายพานซิงโครนัส
กราฟต่อไปนี้เปรียบเทียบเฟสต่างระหว่างcordแก้ว (เส้นสีส้ม) ซึ่งมักใช้เป็นสายสายพานซิงโครนัสทั่วไป กับcordคาร์บอน (เส้นสีเทา) ซึ่งมีคุณสมบัติโมดูลัสความยืดหยุ่นสูง จะเห็นได้ว่าความกว้างของcordคาร์บอนเมื่อเริ่มขับเคลื่อนจะมีขนาดเล็กกว่าcordแก้ว กล่าวอีกนัยหนึ่ง cordคาร์บอนสามารถตอบสนองต่อเอาต์พุตของมอเตอร์ได้เร็วขึ้นและส่งกำลังไปยังด้านที่ขับเคลื่อน ส่งผลให้มีการสะสมของการจัดตำแหน่งที่ไม่ถูกต้องขั้นสุดท้ายน้อยลง
| phase difference (rpm) |
 |
cordแก้ว cordคาร์บอน |
| Time (m/s) |
ปฏิกิริยาตอบโต้
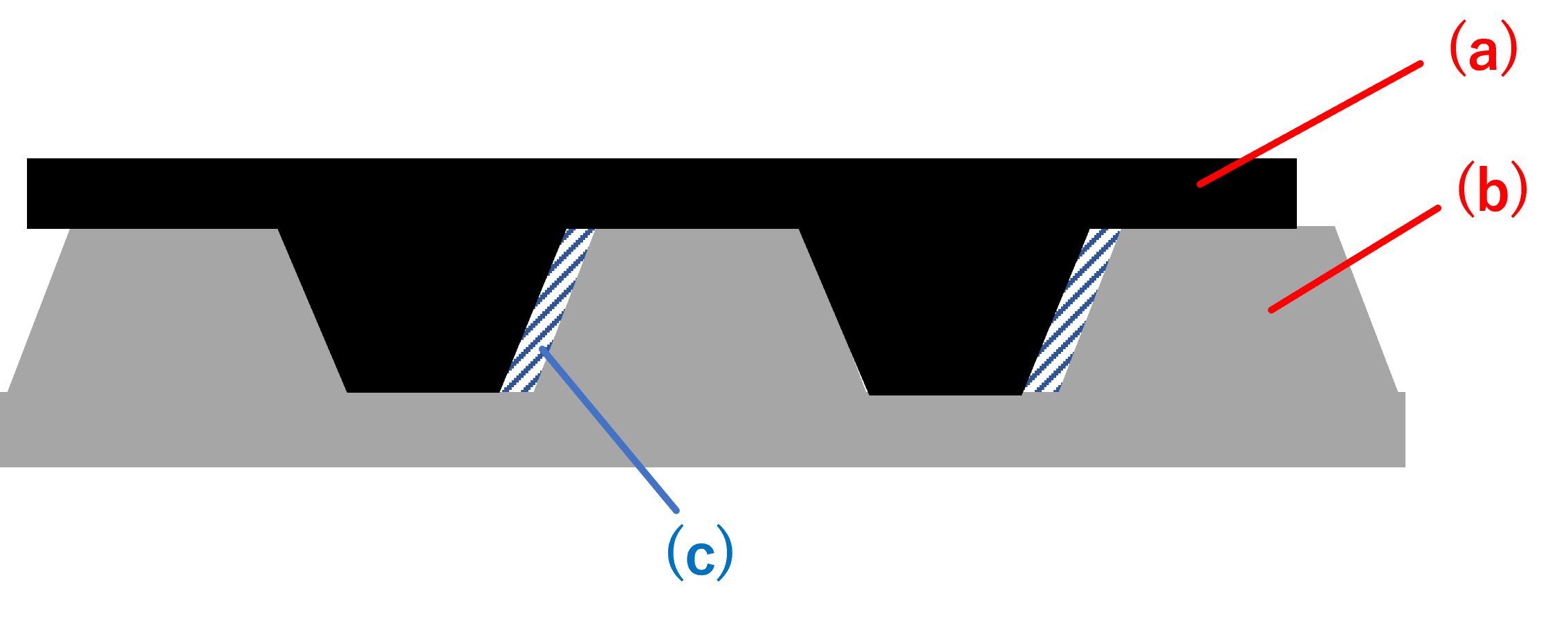
ปริมาณการย้อนกลับ (Backlash) เป็นอีกหนึ่งปัจจัยที่มีผลต่อความแม่นยำในการระบุตำแหน่ง การย้อนกลับหมายถึงช่องว่างระหว่างฟันของ pulley และฟันของสายพาน และปริมาณช่องว่างนี้เรียกว่า "ปริมาณการย้อนกลับ" หากการย้อนกลับมีมาก จะทำให้เกิดความแตกต่างในเวลาการหมุนของ pulley ขับเคลื่อนและ pulley ที่ถูกขับเคลื่อนเมื่อเริ่มต้นใช้งานสายพานหรือเมื่อหมุนในทิศทางย้อนกลับ ดังนั้นเพื่อปรับปรุงความแม่นยำในการระบุตำแหน่ง ปริมาณการย้อนกลับควรมีค่าน้อยที่สุดเท่าที่จะเป็นไปได้
*(a) สายพาน (b) รอก (c) ฟันเฟือง
ปัจจัยที่สำคัญที่สุดที่กำหนดปริมาณการย้อนกลับ (backlash) คือ รูปร่างของฟันของสายพาน รูปร่างของฟันสายพานซิงโครนัสหลักๆ จะถูกแบ่งออกเป็น "ฟันทรงปิรามิด", "ฟันทรงโค้ง", และ "ฟันทรงสามเหลี่ยม"
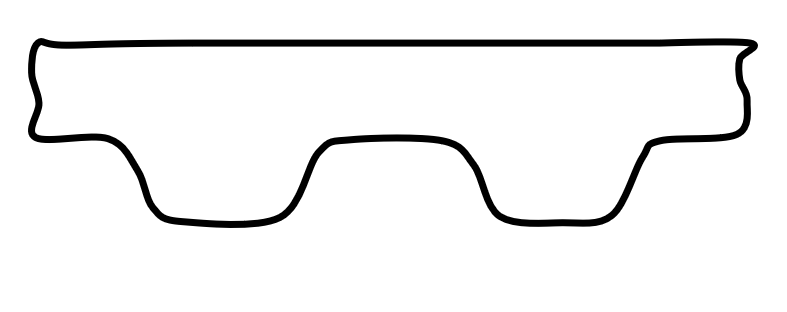
"ฟันสี่เหลี่ยมคางหมู" เป็นรูปร่างฟันที่พัฒนาขึ้นในช่วงแรกของสายพานซิงโครนัส ซึ่งมีปริมาณการย้อนกลับมากกับ pulley ในระหว่างการเชื่อมต่อ ส่งผลให้ความแม่นยำในการระบุตำแหน่งค่อนข้างต่ำในการทำงานทั้งในทิศทางเดินหน้าและถอยหลัง
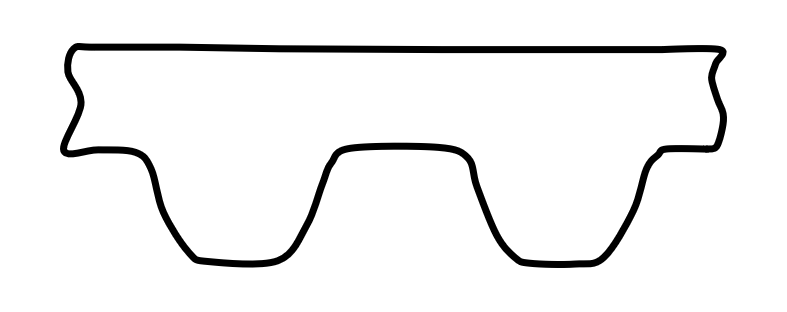
"ฟันโค้ง" เป็นรูปร่างฟันที่ออกแบบมาเพื่อให้ความแม่นยำในการระบุตำแหน่งที่สูงขึ้น, ความสามารถในการรับน้ำหนักที่สูงขึ้น, และอายุการใช้งานที่ยาวนานขึ้น รูปร่างโค้งช่วยให้การเชื่อมต่อราบรื่นยิ่งขึ้นและลดการย้อนกลับ ผลทั้งสองนี้ช่วยปรับปรุงความแม่นยำในการระบุตำแหน่ง
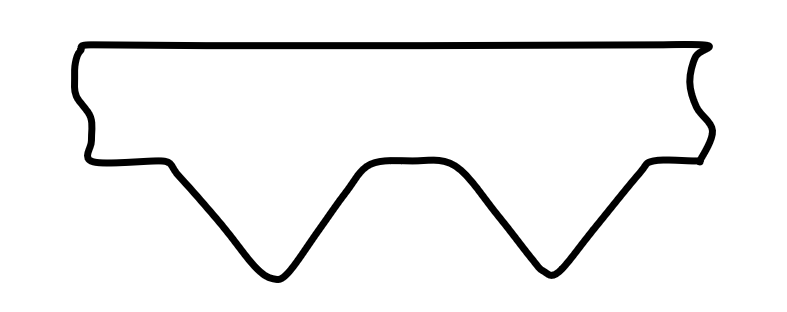
ในประเภท "ฟันทรงสามเหลี่ยม" สายพานจะเชื่อมต่อกับ pulley ตลอดเวลาโดยการสัมผัสทั้งสองพื้นผิวที่รับแรง ทำให้ไม่มีการย้อนกลับ อย่างไรก็ตาม ประเภทนี้มักใช้สำหรับการใช้งานที่ต้องการความแม่นยำในการระบุตำแหน่งสูง, ภาระเบา, และการเปลี่ยนแปลงของภาระที่ค่อนข้างน้อย เนื่องจากมีความเป็นไปได้สูงที่จะเกิดฟันหาย, การกระโดด, และความล้มเหลวอื่น ๆ ภายใต้ภาระหนัก
สายพานชนิดใดเหมาะที่สุดสำหรับการวางตำแหน่งความแม่นยำสูง?
คุณอาจเข้าใจจากคำอธิบายก่อนหน้านี้ว่า สายพานที่มีเชือกที่มีความยืดหยุ่นสูงและรูปร่างฟันทรงโค้งเป็นตัวเลือกที่ดีที่สุดในการลดความแตกต่างของเฟสภายใต้ภาระหนักและการเปลี่ยนแปลงของภาระ
สายพานซิงโครนัสที่ตรงตามเงื่อนไขเหล่านี้คือ สายพานซิงโครนัสที่มีความสามารถในการรับภาระสูงรุ่น Ceptor®-X ของ Bando Chemical ซึ่งเป็นรุ่นระดับสูงที่สุด.
Ceptor®-X ใช้คอร์ดคาร์บอนที่มีความยืดหยุ่นสูง ซึ่งช่วยให้การตอบสนองดีขึ้นและลดความแตกต่างของเฟสน้อยลง นอกจากนี้ยังใช้ "ประเภทฟัน Stooth" ซึ่งมีความสามารถในการถ่ายทอดกำลังสูงในหมู่ฟันทรงโค้ง.
Ceptor®-X เป็นสายพานที่เหมาะสมสำหรับผู้ที่ต้องการความแม่นยำในการระบุตำแหน่งที่สูงในระยะยาวภายใต้ภาระหนัก.
นอกจากนี้ ความสามารถในการส่งกำลังที่ปรับปรุงใหม่ต่อความกว้างของสายพานมีข้อได้เปรียบในการทำให้ความกว้างของสายพานแคบกว่ารุ่น HP-STS ซึ่งเป็นฟันประเภท Stooth มาตรฐานถึง 40% ภายใต้เงื่อนไขเดียวกัน ซึ่งช่วยลดน้ำหนักและพื้นที่ของสายพานและ pulley ที่รองรับ ทำให้เครื่องจักรมีทั้งความแม่นยำในการระบุตำแหน่งสูงและประหยัดน้ำหนักและพื้นที่.
Ceptor®-X ใช้ในแอปพลิเคชันต่างๆ เป็นหลัก เช่น หุ่นยนต์อุตสาหกรรม อุปกรณ์ทางการแพทย์และเภสัชกรรม อุปกรณ์การผลิตเซมิคอนดักเตอร์ และเครื่องฉีดขึ้นรูป โปรดดูรายละเอียดการใช้งานและตัวอย่างที่ด้านล่างของหน้านี้
สรุป
เราได้อธิบายคำจำกัดความของความแม่นยำในการวางตำแหน่งในกลไกการส่งกำลังและ Ceptor®-X ของสายพานซิงโครนัสที่แนะนำสำหรับการบรรลุความแม่นยำในการวางตำแหน่งระดับสูง หากคุณสนใจที่จะบรรลุความแม่นยำในการวางตำแหน่งสูงในกลไกที่ต้องรับภาระสูง โปรดพิจารณา Ceptor®-X ของ Bando Chemical หากคุณมีคำถามใดๆ โปรดติดต่อเรา